One project I did and currently do is the following.
Here you can see the whole construction at a glance.
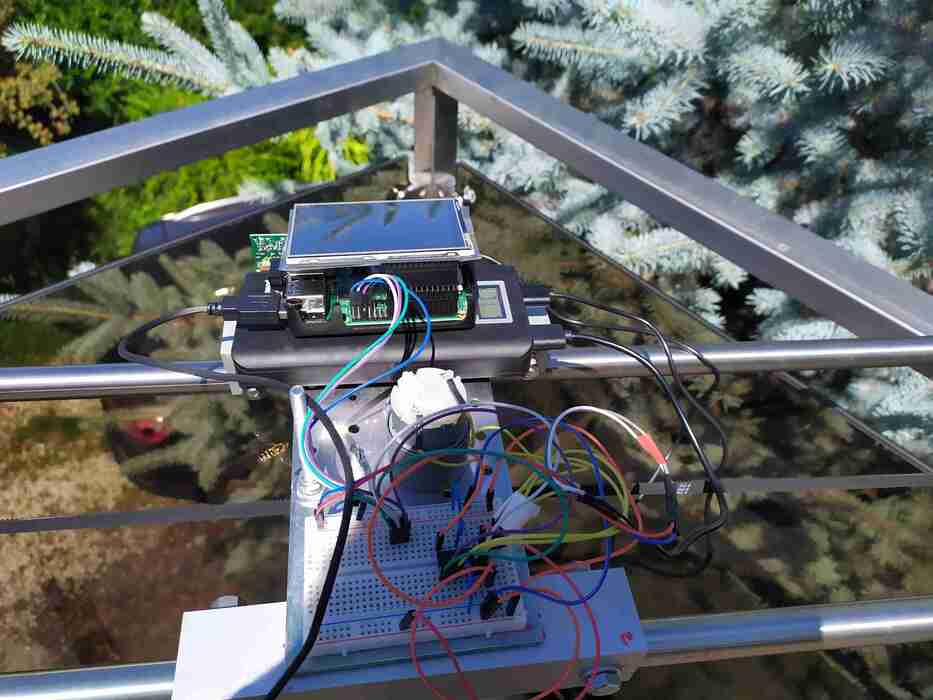
Well, what's all this. As you can see, here is a Rasperry Pi (Pi) mounted on a metal sled. Basically the camera is pulled along the sled with the help of a motor. I was inspired by the projects of this page www.DavidHunt.ie.
Construction


What I basically needed for this project
- Pi
- Pi camera
- touchscreen
- 5V powerbank
- wires
- geared 12V DC motor
- belt
- washer for fixing the belt
- 2 iron rods (clothes rails)
- mounting plate
- u-shaped aluminum profile
- ball bearings
- ...
Code Snippets:
The original code is from James Moore and was edited by me.
#!/usr/bin/env python
# raspiLapseCam.py
#
# Created by James Moore on 28/07/2013.
# Copyright (c) 2013 Fotosyn. All rights reserved.
#
# Import some frameworks
from datetime import datetime
import PiRailSlider_f
# Make New folder
new_folder = PiRailSlider_f.mkdir_folder(folder_path='/home/pi/PiRailSlider/LapsePiTouch/Lapse')
#----------------------------------------------
fileSerial = 1
# Run a WHILE Loop of infinitel
while True:
d = datetime.now()
print('d:', d)
if d.hour > 2:
# rpi-camera
fileSerial = PiRailSlider_f.raspistill(d=d, fileSerial=fileSerial,
new_folder=new_folder
)
fileSerial += 1
# Starts Motor
PiRailSlider_f.Motor12V_GPIO_TimeLapse(Motor1A=37, Motor1B=36, Motor1E=33,
t_motor=1, t_sleep=3
)
else:
# Just trapping out the WHILE Statement
print('=============== Doing nothing at this time')
Youtube Testvideo
